 2018, Vol. 44
2018, Vol. 44文章信息
- 李娜娜, 彭军, 叶剑峰
- LI Na'na, PENG Jun, YE Jianfeng
- 基于火箭橇弹道的北斗接收机动态仿真测试
- Dynamic simulation test of Beidou receiver based on rocket skid trajectory
- 中国测试, 2018, 44(4): 141-146
- China Measurement & Test, 2018, 44(4): 141-146
- http://dx.doi.org/10.11857/j.issn.1674-5124.2018.04.026
-
文章历史
- 收稿日期: 2017-09-12
- 收到修改稿日期: 2017-11-13




北斗卫星导航系统是我国自主建设的全球卫星导航系统,随着其不断完善和应用范围不断扩展,我国开始在飞机、导弹、舰船、坦克、战车等武器型号中使用北斗接收机,因此对它的动态性能提出了更高的要求[1]。
目前,国内外还未形成系统的北斗接收机高动态校准规范。对北斗接收机动态测试的方法有卫星信号模拟器仿真方法、旋转法、高速火箭橇试验法、机载(弹载)法等。其中火箭橇试验是集大过载、高速度、强加速度和强振动于一体的大型地面试验[2],其高动态特性和综合力学环境为北斗接收机的动态校准测试提供了有力的手段。但是火箭橇试验作为一种大型的外场测试试验技术,试验准备周期长,费用高。
近年来多星座导航信号模拟器仿真是北斗接收机动态性能测试的重要手段,它通过控制主机软件根据相应的导航星座数学模型计算生成对应于不同运动轨迹的导航电文和观测数据的场景文件,形成对应的仿真场景[3-4]。模拟器本身自带的运动场景只是简单运动,无法模拟复杂运动。但是它可以加载用户轨迹,对飞机、导弹的真实运动轨迹建立模型,模拟当时飞机、导弹复杂的运动场景,利用这些场景对北斗接收机开展动态仿真测试。
动态仿真测试的关键问题是如何建立可输入模拟器的运动轨迹数学模型。本文以火箭橇运动轨迹为例,着重介绍如何建立仿真模型,并对两款北斗接收机开展仿真校准,验证这一仿真动态测试方法的可行性。仿真测试方法示意图,如图 1所示。

|
| 图 1 动态仿真测试方法示意图 |
1 火箭橇弹道仿真模型建立
多星座信号模拟器加载外部测试轨迹,它所需要的输入源是与时间对应的W84大地坐标系下的位置信息。而火箭橇试验的外测数据包括统一时间下橇体通过滑轨的位置、速度和加速度信息[5]。建立火箭橇弹道数学模型就是将外测数据转换为模拟器可输入的大地坐标系下的数据。这里主要介绍如何在火箭橇试验所采集的加速度信息基础上建立火箭橇仿真模型。火箭橇试验所采集的加速度信息,如图 2所示。

|
| 图 2 某次火箭橇试验加速度曲线 |
在火箭橇运动中,噪声是不可避免的。建立火箭橇弹道数学模型需要由加速度信息通过二次积分得到位置信息,那么加速度中噪声项对积分变换的结果影响较大,会导致位移信息失真,偏差增大[6]。因此在数据处理前,要对加速度信号滤波,最大程度地抑制噪声的干扰。
加速度积分求位移的方法有很多,常用的一个方法是利用低阶插值多项式构造求积公式,例如梯形公式、辛普森公式和布尔公式等。但是火箭橇加速度曲线在某些相邻点变化复杂,如果采样率不高,各种积分方法的积分精度会很差。当然也不是采样率越高越好,如果采样点数太大,计算量就会变大,误差积累也会更严重,另一方面,求积公式的稳定性及收敛性也没有保证。因此在对加速度积分前,先通过三次样条插值适当提高原始加速度数据的采样率。三次样条插值可以构造一个整体上具有二阶连续导数的插值函数,构造的曲线光滑度最高。
加速度积分后得到的位置信息还需要通过坐标转换才能得到大地坐标系下的位置信息。火箭橇弹道仿真模型的建立过程,如图 3所示。

|
| 图 3 火箭橇弹道仿真模型的建立过程 |
1.1 分段多项式滤波
根据文献[7]所述,多项式滤波是一种低通滤波方法,能从观测信号中除去代表信号噪声的高频部分,从而留下反应基本趋势的低频部分。多项式滤波实际上是基于多项式回归模型的信号处理方法。测量信号x(t)可以表示为时间t的函数,即:
 |
(1) |
式中m为模型的阶数。
令θ=[p0,p1,…,pn]′为模型的参数向量,r(t)=[t0,t,…,tn]′为回归变量,式(1)可以简记为
 |
(2) |
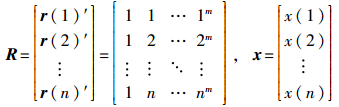
测量信号x在已知的情况下(对于等间距采样,采样时间可以用序号i(i=1,2,…,n)表示),应用最小二乘法可以得到参数θ的最优估计:
 |
(3) |
式中
 |
(4) |
但是火箭橇试验本身是一个很复杂的运动过程,其弹道轨迹不可能用简单的函数就可以表达。如图 2所示的弹道加速度曲线,整个过程用一个多项式去描述很困难。因此,本文采用分段多项式滤波法,以每个采样间隔为单位,分别使用多项式滤波,经过滤波后,加速度曲线如图 4所示,加速度曲线在加速段和减速段较图 2来说都相对光滑。

|
| 图 4 滤波后加速度曲线 |
1.2 基于辛普森公式分段复化加速度积分
为了进一步提高数值积分的精确度,采用分段求积的方法,把每个采样间隔的区间等分为N个子区间,在每个子区间用低阶的求积公式,然后将所有子区间的计算结果累加起来,原理如下[8]:
相邻两个采样间隔[ti,ti+1]等分为N个子区间[ti2k,ti2k+2](k=0,1,2,…,N-1),每个区间的中点为ti2k+1(k=0,1,2,…,N-1),子区间的长度为
 |
(5) |
采样间隔内积分的结果为
 |
(6) |
式中
利用上述方法,加速度经过一次积分、二次积分分别得到火箭橇弹道与时间相关的速度和位移序列如图 5所示,其中位移曲线中纵坐标指每时刻橇体在滑轨上距离起始点的相对距离。

|
| 图 5 积分后得模型的速度和位移曲线 |
1.3 坐标转换
经过滤波、三次样条插值和加速度二次积分,得到时间位移序列,但要转换成模拟器的可接受的位置输入数据,还需将位移序列转换到火箭橇轨道上相应时间点的大地坐标。
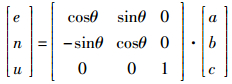
以火箭橇轨道上点火点为起点,轨道为A轴(假设轨道在垂直天向的平面内),垂直轨道的方向为B轴,天向为C轴建立坐标系(轨道坐标系),经过测试,轨道与东向的夹角为θ=71.21°。以点火点(设为点Q)为原点,建立站心(东北天)坐标系。假设轨道坐标系A轴和B轴所在平面和站心坐标系东向E轴和北向N轴所在平面为同一个平面,站心坐标系U轴和轨道坐标系C轴重合。已知原点的大地坐标为(B0,L0,H0),B0=32.400 540 248 3,L0=112.135 945 237 1,H0=0.952。坐标转换如图 6所示。

|
| 图 6 轨道坐标系到站心坐标系坐标转换图 |
若P点在轨道坐标系中的坐标为(a,b,c),则P点在站心坐标系中的坐标(e,n,u)为
 |
(7) |
式中θ=71.21°。
要把站心坐标转换为经纬度坐标,首先将其转换成地心地固直角坐标。
点火点Q为站心坐标系的原点,在站心坐标系中的坐标为(0,0,0),在地心地固直角坐标系的坐标为(x0,y0,z0),则:
 |
(8) |
 |
(9) |
 |
(10) |
式中:e2——椭球偏心率,
N——基准椭球体卯酉圆曲率半径,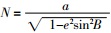
a——基准椭球体的长半径,6 378 137.000 m;
b——基准椭球体的短半径,6 356 752.314 1 m。
假设所要转换的点P在站心坐标系的坐标为(e,n,u),在直角坐标系中的坐标为(x,y,z),那么PQ在站心坐标系中的向量为(Δe,Δn,Δu)=(e,n,u),在直角坐标系中的向量为(Δx,Δy,Δz)=(x-x0,y-y0,z-z0)。一个矢量的站心坐标可以变换为地心地固直角坐标系中,变换公式为
 |
(11) |
其中坐标变换矩阵S为
 |
(12) |
式中S为单位正交矩阵,即S-1=ST。
那么将P点在站心坐标系中的坐标转换为在地心地固直角坐标系中的坐标,即:
 |
(13) |
将P点的地心地固直角坐标转换为大地经纬度(B,L,H):
 |
(14) |
 |
(15) |
 |
(16) |
式中
由式(14)~式(16),可以计算出纬度、经度、高度。由式(14)可直接计算经度,式(15)和式(16)都依赖于高度和纬度,所以其解可按如下步骤进行迭代计算得到:
1)计算

2)由
3)由
4)由
5)由
6)进行迭代检核,如果B=B(0)则迭代结束;否则B(0)=B,并从第3)步开始继续迭代[9]。
导航信号模拟器通过上位机软件将建立好的火箭橇弹道仿真模型生成对应的仿真场景,即可对北斗接收机进行仿真试验。
2 北斗接收机仿真试验试验选取了两个不同型号的接收机开展仿真试验:高动态GNSS接收机(1号接收机)和高动态卫星导航模块(2号接收机)。1号接收机支持北斗系统B1频点和GPS系统L1频点,具有3种导航模式:双系统导航模式、北斗系统导航模式和GPS系统导航模式;2号接收机支持北斗系统B1和B3频点。为使试验结果具有对比性,1号接收机选取了两种导航模式,双系统和单北斗导航模式,而2号接收机选取北斗系统导航模式。
如果要验证这种动态测试方法是否可行,需要通过对比仿真试验中同一时间坐标系下接收机的解算数据和火箭橇弹道模型数据得出北斗接收机的动态定位误差和速度误差,看能否反应北斗接收机的动态性能。仿真结果见图 7和表 1。

|
| 图 7 接收机仿真试验结果 |

1)1号和2号接收机的技术指标为:动态定位精度 < 10 m,速度精度 < 0.2 m/s。从试验结果可以看出,2号接收机满足指标的要求。
2)1号接收机的速度误差比2号接收机大,并且速度误差有抖动的地方。对比图 4的加速度曲线和图 5的速度曲线可知,抖动均是在加速度有突变,速度不平滑的点。主要原因可能有以下3个方面:
① 加速度的突变对接收机的解算影响很大,说明1号接收机内部的高阶载波跟踪环路动态跟踪能力不如2号接收机,高阶环路反应较慢,遇到有加速度突变的点,速度不能及时收敛,所以就造成了图 7(a)所示的情况。有时接收机为了提高动态定位精度,不得不降低它的动态响应速度。
② 1号接收机是一款高动态、高性能北斗和GPS双模卫星接收机,所以在双系统联合导航模式下的解算结果要优于单北斗系统导航模式,从表 1中可以看出,在双系统模式下,速度误差和位置误差都比较小,尤其是位置误差,比在北斗系统模式下小很多。
③ 北斗接收机的导航模式和动态跟踪能力对它的动态定位精度和速度精度有很大的影响。
通过对两款接收机开展仿真试验,并对试验结果进行对比分析,可以得出,仿真试验得到的接收机动态定位误差和速度误差在一定程度上可以反映北斗接收机的动态性能:2号接收机的动态性能要优于1号接收机;在双系统(GPS和北斗)导航模式下接收机的动态性能要优于在单北斗导航模式下。
3 结束语在某次火箭橇试验采集的加速度信息基础上建立了火箭橇弹道仿真模型,并将其作为模拟器的输入源,形成仿真场景,对两款接收机开展了动态仿真测试试验。试验结果表明,这种方法可以在一定程度上测试接收机的动态性能,可以作为接收机动态测试的一个有效手段。同时,也可以在火箭橇等大型试验前利用本文方法测试接收机性能。
导航信号模拟器虽然能够为北斗接收机提供一个稳定、准确、可靠和易用的环境,虽然模拟器输出的信号接近实际环境中的卫星信号,但是模拟器中的对流层、电离层等模型和实际环境仍有差别,例如它无法准确模拟测试环境中的多路径响应误差、火箭橇试验环境中的各种噪声以及火箭橇运动垂直方向存在的加速度等。
| [1] |
郑善魁, 胡杰, 孙颖, 等. 基于火箭橇的北斗动态定位精度鉴定方法[J].
导航和控制, 2015, 14(6): 9-13.
|
| [2] |
段宇鹏, 魏宗康, 刘建波, 等. 惯性测量装置火箭橇试验外测数据融合方法[J].
中国惯性技术学报, 2013, 21(4): 553-556.
|
| [3] |
贾广超, 肖海霞. 基于卫星信号模拟器的北斗接收机性能测试与分析[J].
导航定位学报, 2013, 1(4): 14-16.
|
| [4] |
张亮, 蔡乐, 马舒洁, 等. 高精度轨道摄动模型在GPS导航信号模拟器中的作用[J].
航天器工程, 2016, 25(2): 64-69.
|
| [5] |
唐瑞, 姚冉中. 基于高速火箭橇测速系统的误差分析[J].
现代电子技术, 2015, 38(1): 103-105.
|
| [6] |
王剑, 王璋奇. 振动加速度数值积分得Lagrange多项式拟合方法[J].
噪声与振动控制, 2015, 35(6): 191-197.
|
| [7] |
付克昌, 戴连奎, 吴铁军. 基于多项式滤波算法的自适应稳态检测[J].
化工自动化及仪表, 2006, 33(5): 18-21.
|
| [8] |
李信真, 车刚明, 欧阳洁, 等.
计算方法[M]. 2版. 西安: 西北工业大学出版社, 2010, 160-161.
|
| [9] |
谢钢.
GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2012, 48-50.
|
| [10] |
梁健. 目标定位精度评估方法研究[J].
无线电工程, 2015, 45(4): 65-69.
|